shapestacks
ShapeStacks
ShapeStacks Dataset

MuJoCo world definitions (39 MB):
 shapestacks-mjcf.tar.gz · shapestacks-mjcf.md5
shapestacks-mjcf.tar.gz · shapestacks-mjcf.md5
Meta information (156 KB):
shapestacks-meta.tar.gz · shapestacks-meta.md5
RGB images (33 GB):
shapestacks-rgb.tar.gz · shapestacks-rgb.md5
Violation segmentation maps (875 MB):
shapestacks-vseg.tar.gz · shapestacks-vseg.md5
Instance segmentation maps (352 MB):
shapestacks-iseg.tar.gz · shapestacks-iseg.md5
Depth maps (1.1 GB):
shapestacks-depth.tar.gz · shapestacks-depth.md5
The dataset can also be downloaded from the command line using wget:
wget http://shapestacks-file.robots.ox.ac.uk/static/download/v1/ShapeStacks-Manual.md # ShapeStacks-Manual.md
wget http://shapestacks-file.robots.ox.ac.uk/static/download/v1/shapestacks-mjcf.tar.gz # shapestacks-mjcf.tar.gz
wget http://shapestacks-file.robots.ox.ac.uk/static/download/v1/shapestacks-meta.tar.gz # shapestacks-meta.tar.gz
wget http://shapestacks-file.robots.ox.ac.uk/static/download/v1/shapestacks-rgb.tar.gz # shapestacks-rgb.tar.gz
wget http://shapestacks-file.robots.ox.ac.uk/static/download/v1/shapestacks-vseg.tar.gz # shapestacks-iseg.tar.gz
wget http://shapestacks-file.robots.ox.ac.uk/static/download/v1/shapestacks-iseg.tar.gz # shapestacks-iseg.tar.gz
wget http://shapestacks-file.robots.ox.ac.uk/static/download/v1/shapestacks-depth.tar.gz # shapestacks-depth.tar.gz
Source Code
 Check out the source code on GitHub.
Check out the source code on GitHub.
We provide a dataset handler for ShapeStacks using Tensorflow dataset API. It also contains example scripts for training and evaluation of the stablity prediction models.
Pre-trained stability prediction models based on InceptionV4 (1.8 GB):
shapestacks-incpv4.tar.gz · shapestacks-incpv4.md5
Paper @ ECCV 2018
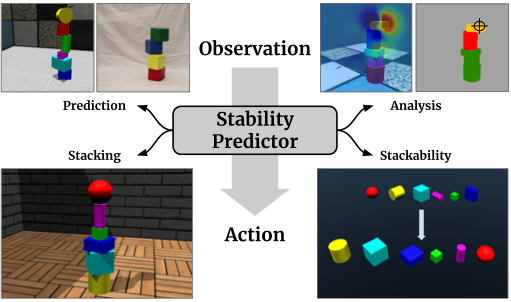


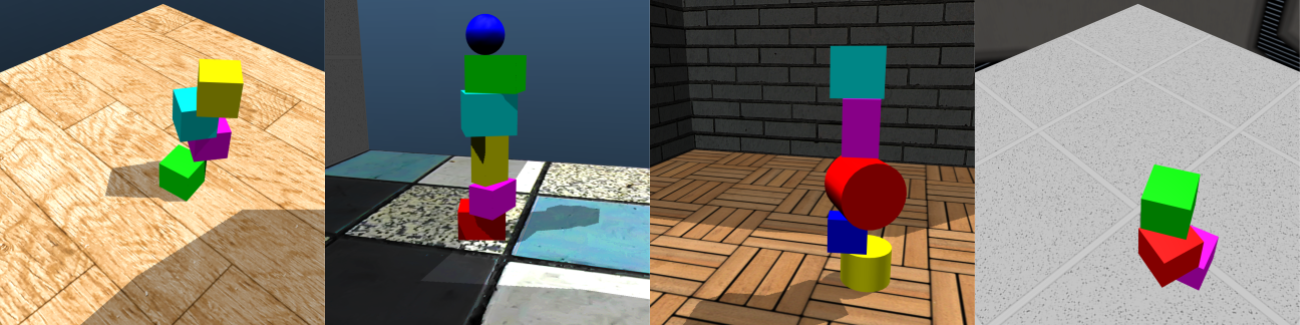
Physical intuition is pivotal for intelligent agents to perform complex tasks. In this paper we investigate the passive acquisition of an intuitive understanding of physical principles as well as the active utilisation of this intuition in the context of generalised object stacking. To this end, we provide ShapeStacks: a simulation-based dataset featuring 20,000 stack configurations composed of a variety of elementary geometric primitives richly annotated regarding semantics and structural stability.
Contact
 |
 |
 |
|---|---|---|
| Oliver Groth, Fabian Fuchs, Ingmar Posner, Andrea Vedaldi | Applied AI Lab, Visual Geometry Group | Research funded by ERC 677195-IDIU, AIMS-CDT |